Już od ponad pół wieku roboty stanowią integralną i nieodzowną część każdego nowoczesnego zakładu produkcyjnego. Coraz większe wymagania stawiane przed tego typu przedsiębiorstwami, a także coraz szerszy zakres ich obowiązków sprawiają, że roboty do celów przemysłowych podlegają nieustannej ewolucji, systematycznie zwiększając zasięg swego zastosowania. To one zastępują człowieka na stanowiskach szczególnie uciążliwych i niebezpiecznych dla pracowników, a dzięki robotyzacji czynności wykonywane są o wiele szybciej i precyzyjniej, co przekłada się na większa wydajność pracy.
Roboty dla konkurencyjności, bezpieczeństwa oraz kontroli kosztów
Każda gałąź przemysłu charakteryzuje się unikalnymi wyzwaniami. Nowoczesne zakłady produkcyjne potrzebują dzisiaj prostych, lecz wytrzymałych i wydajnych rozwiązań, aby im sprostać. Aby stale rozwijać przedsiębiorstwo, realizować założenia Przemysłu 4.0 i zapewnić odpowiednią jakość i konkurencyjność produktu na rynku, konieczna jest automatyzacja produkcji. Wszystko to przy zachowaniu najwyższych norm bezpieczeństwa i kontroli kosztów.
Współczesne roboty do celów przemysłowych sprawdzają się zarówno w przypadku prostych, monotonnych, ale również niebezpiecznych dla człowieka czynności, jak i coraz bardziej skomplikowanych zadań wymagających szczególnej szybkości oraz precyzji wykonania. Roboty przemysłowe znajdują szerokie zastosowanie przede wszystkim w paletyzacji kartonów czy opakowań, załadunku i rozładunku, spawaniu i obróbce (m.in. szlifowanie, wiercenie, frezowanie, itp.), a także przy malowaniu i lakierowaniu czy też uszczelnianiu i nakładaniu klejów. Roboty do celów przemysłowych coraz częściej wykorzystywane są nie tylko w produkcji masowej, ale również jednostkowej.
Najważniejsze typy współczesnych robotów przemysłowych, to:
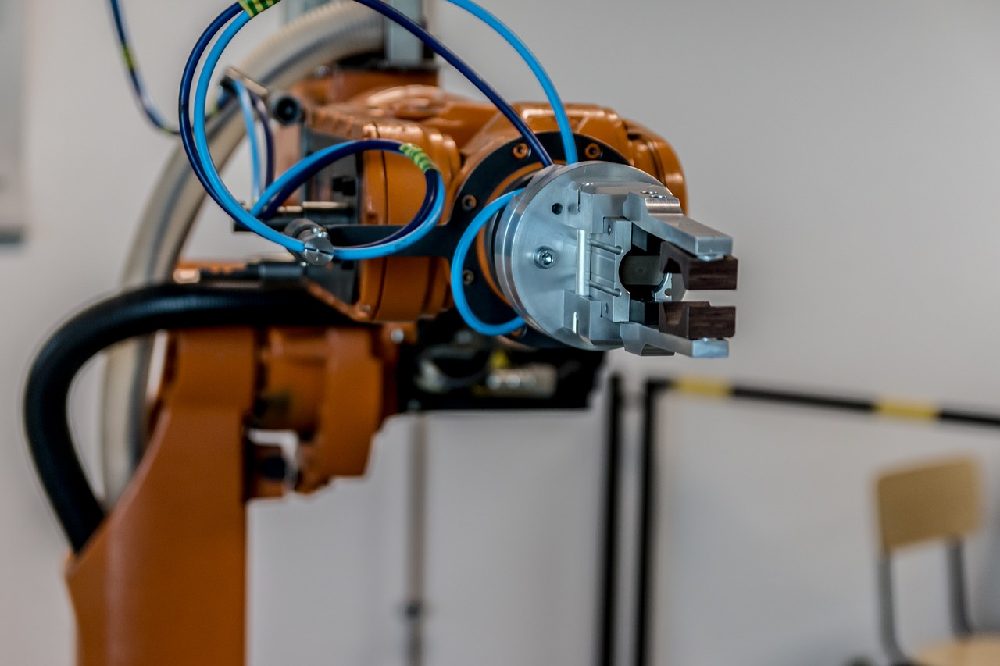
- roboty przegubowe, których budowa przypomina kształtem ludzkie ramię i w podobny sposób pracuje; roboty tego typu wyposażone są w przeguby i mają 6 osi obrotu,
- roboty kartezjańskie mogą poruszać się w 3 prostopadłych do siebie osiach, czyli przód-tył, lewo-prawo i góra-dół,
- roboty cylindryczne są wyposażone w ramię prostopadłe do podłoża, które porusza się w płaszczyźnie góra-dół; roboty cylindryczne pracują na przestrzeni podobnej do wydrążonego cylindra,
- roboty sferyczne to urządzenia, w których obszar roboczy stanowi ścięta z góry i dołu sfera; ramię takiego robota jest w stanie wychylać się w górę i w dół,
- roboty do celów przemysłowych typu SCARA to 2-przegubowe urządzenia, wykonujące ruch osi góra i dół; stosuje się je najczęściej do wykonywania operacji typu podnieś i postaw,
- roboty typu Delta (równoległe) stosuje się zwykle do montażu sufitowego; urządzenia te zbudowane są z bazy i ramion trzymających platformę oraz chwytaka,
- roboty współpracujące (nazywane również cobotami) to urządzenia mogące współpracować bezpośrednio z człowiekiem,
- roboty mobilne to inteligentne mechanizmy, które spotkać można najczęściej w logistyce magazynowej.
Konkretny rodzaj budowy robota określa jego zastosowanie. Ważne są jednak również inne parametry, jak np. wymiary i zasięg robota, jego udźwig, szybkość, a nawet szczelność.
Roboty przegubowe doskonale sprawdzają się w zadaniach paletyzacji, spawania oraz pakowania. Roboty kartezjańskie to idealne urządzenia do wszelkiego rodzaju przenoszenia. Ich obszar roboczy ma kształt prostopadłościanu i może być dosyć duży. Niestety, sumarycznie zajmują dosyć dużo miejsca. Z kolei roboty do celów przemysłowych typu SCARA pozwalają na szybkie układanie elementów. Nie mają może dużego udźwigu, lecz są niezwykle szybkie. Pozwalają na utrzymywanie stałego przyspieszenia w ruchu, przy zachowaniu dużej dokładności. Roboty równoległe to natomiast rozwiązania umożliwiające szybkie układanie i przenoszenie elementów. Ich zaletą jest sztywność i precyzja ruchu, a przy tym nie zajmują wiele miejsca, ponieważ zazwyczaj podwieszone są pod sufitem lub na innym stałym ramieniu.